O Marvin é um protótipo de veículo autônomo voltado para ambiente industrial. Os robôs seguidores de linha são uma categoria de robôs programados a realizarem percursos demarcados por linhas, e são comuns no ambiente industrial e, por isso, serviram de base para este trabalho.
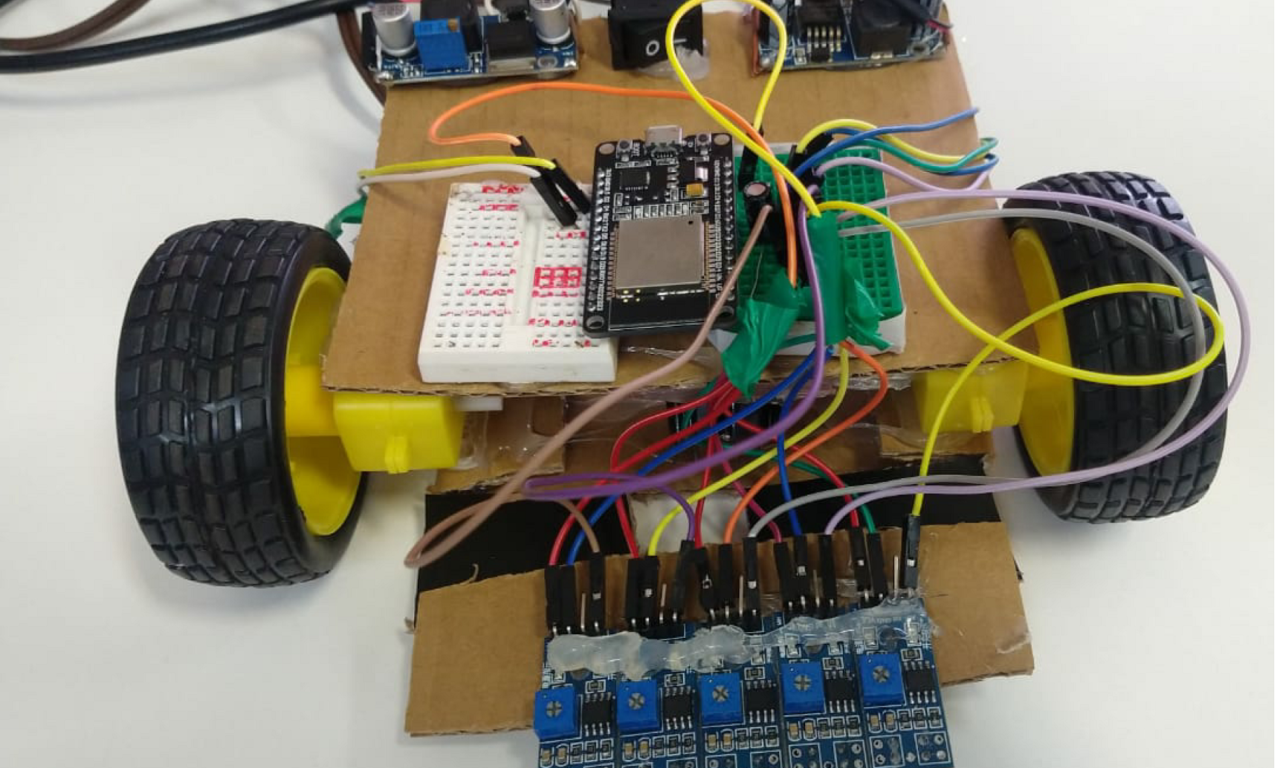
Foram utilizados 6 módulos sensor reflexivo infravermelho TCRT5000. O módulo possui um LED que emite luz infravermelha e um fototransistor sensível a essa luz que permite detectar a linha por meio da variação de luz infravermelha refletida pela superfície. Os sensores foram fixados bem próximos um do outro, para maximizar a acurácia da leitura. Também foi utilizado um módulo STEP-DOWN, que atua regulando a tensão que sai da fonte de alimentação do protótipo e vai direto para as entradas de alimentação do ESP32 e da ponte H que controla os motores. O ESP32 foi a placa de prototipação selecionada para o projeto.
Após a implementação do algoritmo conhecido como “On/Off” percebemos que os movimentos bruscos realizados a cada leitura faziam o Marvin perder a rota. Outro ponto negativo desse modelo foi a baixa autonomia e a grande quantidade de tentativa e erro, uma vez que cada falha exigia alteração na potência do motor e novos testes. Após algumas pesquisas encontramos trabalhos que empregavam o controle PID (controlador proporcional, integral e derivativo), que usa como base os princípios matemáticos de proporcionalidade, integral e derivada.
No controlador PID, o sinal de saída usado para controlar o motor leva em consideração o erro atual, o erro passado e a previsão de erro futuro. Os primeiros testes mostraram que a variável mais importante era a que se referia ao erro atual e conseguimos obter um bom controle do robô. Mesmo com essa melhora o robô não sabia onde estava com relação à linha. Dessa forma, uma segunda implementação que foi adicionada ao código fez uso de uma máquina de estados finitos. Essa funcionalidade foi adicionada para que o protótipo ficasse mais inteligente e autônomo.
Com base nos resultados obtidos nos testes, a autonomia que foi dada ao protótipo com a implementação do PID e máquina de estados fez com que ele conseguisse fazer ajustes em segmentos ou curvas em seu trajeto da forma mais sutil possível. Este feito é comemorável tendo em vista o fato de que se o mesmo estivesse transportando uma carga, o risco dela ser avariada durante o transporte seria minimizado.
O protótipo foi desenvolvido colaborativamente por integrantes dos projetos PEACOSE e PESC, membros do manna_team, apoiado pelo Edital n°5/2019 – Edital Unificado de pesquisa PIBIC/PIAP do IFPR. Confira mais detalhes sobre o MARVIN no canal do PESC no Youtube neste link . Maiores informações entre em contato conosco!