O RASPCAR tem como meta discutir e popularizar como as gigantes do automobilismo e da robótica estão operacionalizando o conceito de carro autônomo, além de construir e adaptar um protótipo com funções semelhantes a partir de ferramentas de custo e escala reduzida. Prática que inclusive, oportuniza a obtenção de determinadas noções de trabalho deste setor de maneira menos abstrata possível, aguçando os sentidos do ponto de vista científico. As discussões sobre os problemas encontrados, a viabilização de hipóteses de solução, bem como o desenvolvimento seguido de testes, análise de resultados e os respectivos refinamentos permitem atingir os objetivos do protótipo.
Estudos apontam que um veículo autônomo deve realizar 4 tarefas básicas, sendo elas: navegação, cobertura, localização e mapeamento, tarefas estas que podem ser resumidas em 3 perguntas: “Como eu chego lá?”, “Onde estou?” e “Onde estive?”. A partir disso, três conceitos passaram a ser utilizados com frequência: caminho (conjunto de posições no espaço que será percorrido); trajetória (conjunto de pares caminho/velocidade, utilizados para ir de um ponto a outro) e planejamento (construção de uma trajetória livre de acidentes). Desta forma, o desenvolvimento do RASPCAR foi pautado por estes questionamentos.
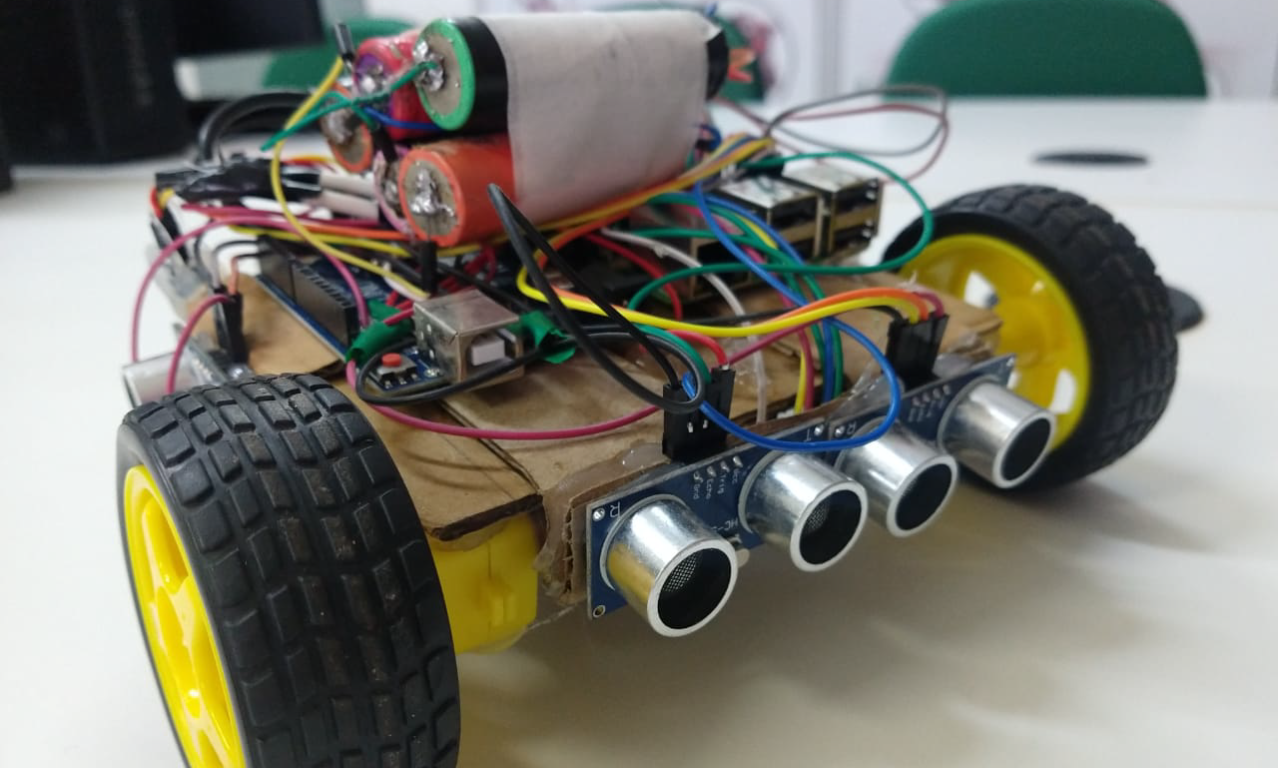
O material escolhido para a confecção do chassi do protótipo foi o papelão, experiências anteriores mostraram que o material era adequado e de baixíssimo custo, conforme premissas do projeto. Uma vantagem do papelão é o peso, atributo indispensável para um movimento suave, além da facilidade de modelagem que exigiram tesouras e estiletes para polimento e corte, ferramentas consideradas de mais fácil porte e manuseio.
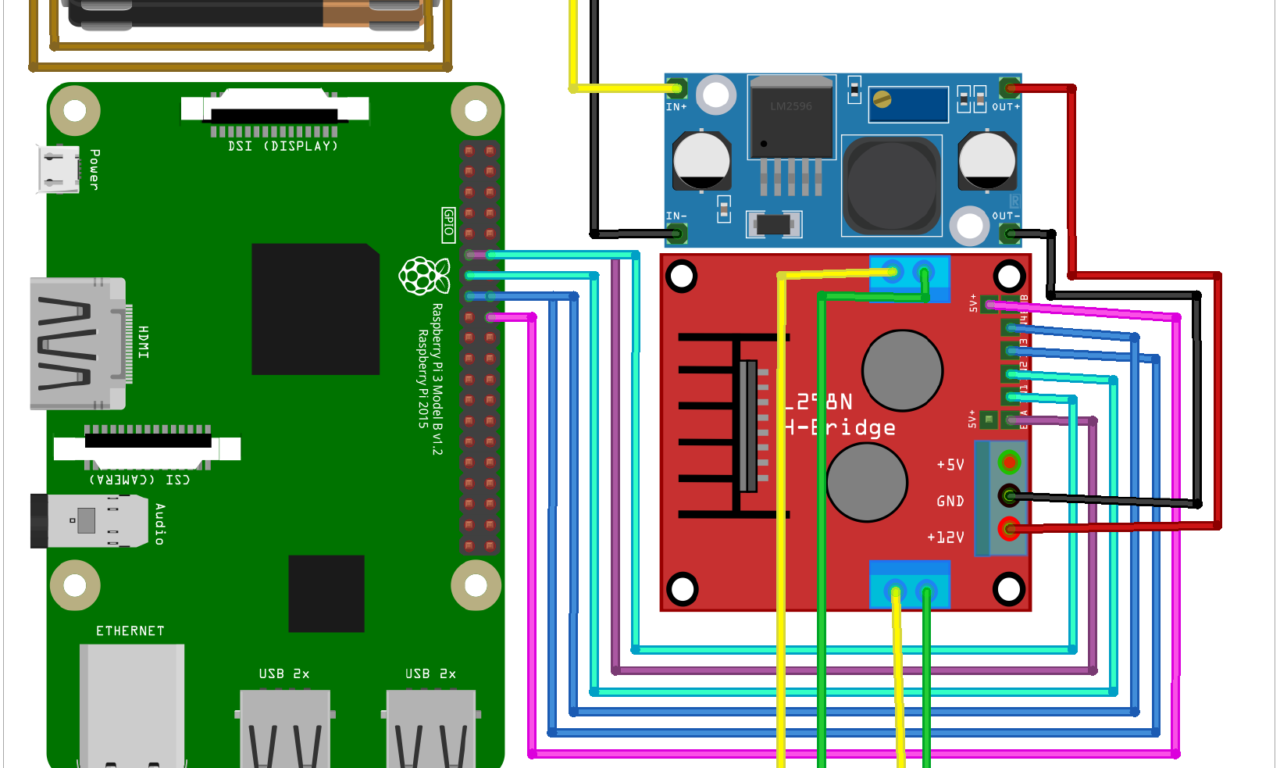
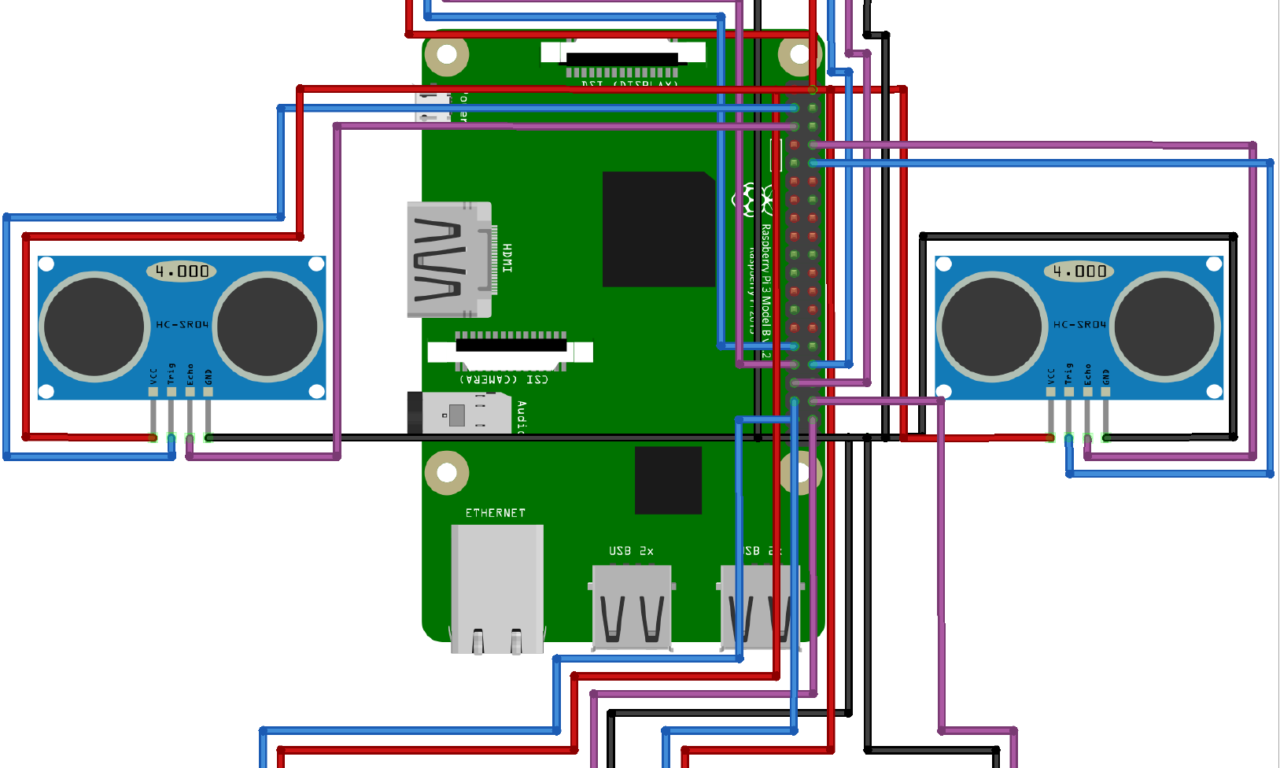
Sensores ultrassônicos foram colocados no local onde ficam os faróis e os retrovisores de um carro comum, na extremidade frontal, lateral e traseira, para que o RASPCAR identifique, em tempo real, a presença de obstáculos e execute o melhor movimento para evitar colisão. O chassi ainda possui duas rodas controladas por motores e uma terceira que serve de apoio multidirecional. Uma placa Raspberry Pi controla os dois circuitos necessários para o funcionamento do carrinho, o circuito dos motores e dos sensores. Testes inicias sugerem que a navegação livre de colisões, objetivo principal da primeira fase, apresentaram resultados promissores. Novas funcionalidades serão incluídas com o decorrer dos estudos.
O protótipo foi desenvolvido colaborativamente por integrantes dos projetos PEACOSE e PESC, membros do manna_team, apoiado pelo Edital n°5/2019 – Edital Unificado de pesquisa PIBIC/PIAP do IFPR. Confira mais detalhes sobre o RASPCAR no canal do PESC no Youtube neste link . Maiores informações entre em contato conosco!